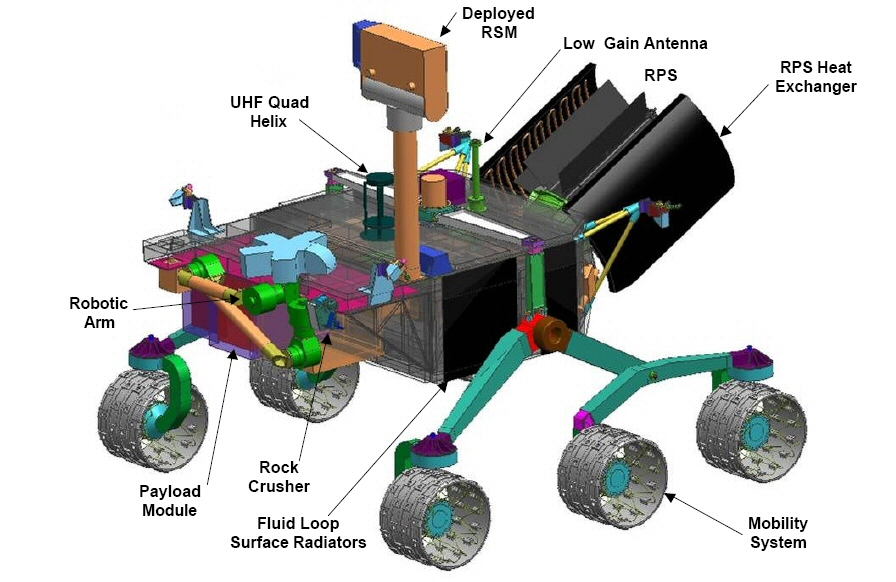
In luna decembrie a anului 2008 fostul administrator NASA Ed Griffin anunta ca data initiala de lansare a noului rover martian fixata pentru octombrie 2009 nu va putea fi respectata datorita problemelor de proiectare si constructie intampinate si imposibil de rezolvat fara a pune o presiune suplimentara (si implicit riscul aparitiei unor greseli) asupra echipei de proiectanti. Cum fereastra ciclica de lansare de 26 de luni oferita de alinierea planetelor s-ar inchide la sfarsitul acestui an, noul termen propus a fost unanim acceptat de specialisti.
In asteptarea lansarii programate pentru anul 2011 si pentru a oferi publicului larg macar o satisfactie la nivel de imagine care sa justifice cresterea costului misiunii de la cei 1.6 miliarde de dolari in 2006 la actuala suma vehiculata de 2.3 miliarde dolari, NASA a ales zilele trecute un nume pentru roverul martian construit in cadrul programului Mars Science Laboratory. Castigatoarea concursului national de eseuri si cea care a convins echipa tehnica a NASA a fost eleva de 12 ani din Kansas, Clara Ma, cea care a propus numele de “Curiosity” impunandu-se in fata celorlalti 9000 de candidati.
Ce inseamna asadar “Curiosity” in plan tehnic? Noul rover face parte din programul pe termen lung al NASA pentru explorarea planetei rosii-cunoscutul “Mars Exploration Program” dar spre deosebire de generatia anterioara de roboti va pune in practica tehnologii de ultima ora care ar trebui teoretic sa ii imbunatateasca performantele tehnice si sa ii creasca perioada de operare la suprafata lui Marte (mai ales luand in considerare conditiile meteo nefavorabile in care va trebui sa functioneze).
Toate experimentele stiintifice se vor concentra pe capacitatea habitatului de pe Marte de a sustine (in prezent sau in trecut) conditiile necesare dezvoltarii unor forme de viata, fie ea si la nivel miscroscopic. Aceasta in preagatirea pe viitor a unei explorari cu echipaj uman. Cum rocile de la suprafata planetei rosii sunt evidente ale evolutiei in timp, se vor studia cu predilectie mostrele prelevate din sol sau din stancile martiene cu ajutorul unui laborator performant care echipeaza roverul martian si care este compus din 10 instrumente stiintifice provenind din SUA, Germania, Franta, Rusia, Spania si Canada:
- Mastcam- Mast Camera
- ChemCam- Chemistry & Camera
- APXS-Alpha Particle X-ray spectrometer
- MAHLI- Mars Hand Lens Imager
- CheMin- Chemistry and Mineralogy X ray diffraction/X ray fluorescent instrument
- SAM- Sample analysis at Mars
- RAD-Radiation Assessment Detector
- REMS-Rover Environmental Mon
- MARDI- Mars Descent Imager
- DAN- Dynamic Albedo of Neutrons
Desi inspirat din tehnologia unor programe anterioare ale NASA noua misiune va aduce noutati absolute in domeniul aerospatial. Sistemul este compus din platforma de calatorie interplanetara intre Pamant si Marte asa numitul “cruise stage” lansat la bordul unei rachete Atlas V 541 care il va ajuta sa scape de atractia gravitationala a Pamantului si il va inscrie in cursa spre Marte (intregul sistem la desprinderea de suprafata terestra va cantari 3400kg). Cu un design inspirat din misiunile Mars Pathfinder si Mars Exploration Rover acesta va cantari 400kg si va fi constituit dintr-o structura de aluminiu cu diametru de 4m care incorporeaza toate sistemele electrice si mecanice clasice ale unui satelit. In timpul lansarii acesta va comunica cu sistemele rachetei, iar mai tarziu dupa decuplare si inscrierea pe orbita va realiza 5 sau 6 manevre de corectie orbitala pentru atingerea traiectoriei dorite in jurul lui Marte. Navigatia se va realiza folosind sistemele clasice inertiale cu camere stelare si cu un sistem de propulsie cu 8 motoare folosind hidrazina stocata in 2 rezervoare de titan la bord. Platforma va fi stabilizata prin rotatie la o viteza de 2rpm.
In tot acest timp modulul va fi responsabil de asemenea cu pastrarea controlului termic cat mai strict asupra roverului incubat la bord astfel ca sistemele acestuia sa ramana complet functionale in timpul calatoriei spre Marte. Aceasta se face fie prin sisteme pasive folosind straturi de materiale izolatoare sau prin sisteme active cu termistori sau radiatoare si pompe de circulare a fluidelor care distribuie in functie de caz caldura disipata de echipamentul electronic spre zonele sensibile neincalzite sau spre exteriorul rece din spatiu. Puterea va fi generata folosind panourile solare exterioare si va fi inmagazinata in bateriile de la bord.
Calculatorul de bord va monitoriza in permanenta situatia si va inainta telemetria catre 2 antene in banda X care vor comunica cu centrul de comanda de pe Pamant.
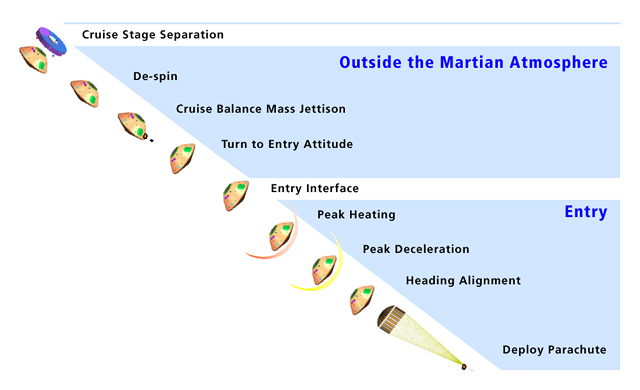
Cu 45 de zile inaintea intrarii in atmosfera martiana, va incepe asa numita faza “approach” de apropiere de planeta atunci cand vor fi programate manevre de corectie de traiectorie, vor fi initiate masuratori frecvente de pozitie si respectiv ajustari ai parametrilor orbitali de reintrare in atmosfera, va fi pornit software-ul care va controla automat secventa de zbor in atmosfera, vor fi actualizate secventele de comenzi si intervalele de comunicatie setate pentru primele zile pe Marte ale roverului precum si activitatile pregatitoare ale platformei de baza in vederea separarii capsulei de reintrare in atmosfera (printre care si marirea ratei de telemetrie furnizata si folosirea anetenelor puternice ale Deep Space Network pentru o buna monitorizare la sol a momentelor critice din timpul traversarii atmosferice).
Faza de intrare, traversare a atmosferei si de aterizare, asa numita EDL “entry, descent and landing” va incepe la o altitudine de 125km prin decuplarea platformei de baze care a sustinut zborul de la Pamant la Marte si se va incheia prin aterizarea roverului la suprafata planetei. Secventa de zbor este impartita in 4 etape: reorientarea si pastrarea pe unghiul de intrarea dorit al capsulei cu ajutorul unui sistem similar cu cel de la misiunea Apollo (fie pasiv prin mici corectii aplicate centrului de masa sau activ printr-un sistem de 4 perechi de minimotoare fiecare dezvoltand o forta de 500N), franarea atmosferica pasiva care va incepe la o viteza de Mach2 cu ajutorul unei parasute supersonice in lungime de 50m si cu un diametru de 16m (la fel ca in misiunile Viking, Mars Pathfinder sau Mars Exploration Rover) dublata de o franare asistata si apoi coborarea roverului la sol.
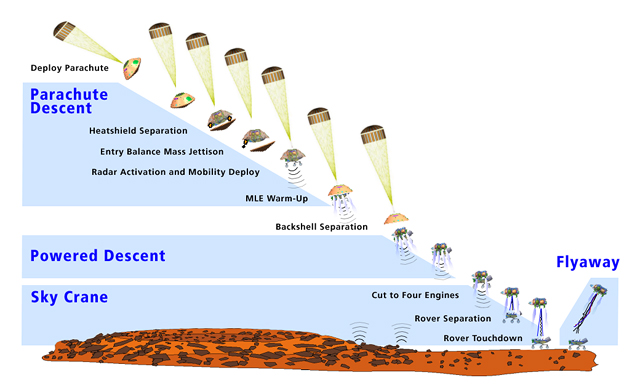
Aceste ultime doua faze sunt noutati absolute si numai privindu-le pe hartie par impresionant de realizat mai ales la o distanta atat de mare de Pamant. Datorita greutatii mari a noului rover (aproape 900kg in total din care 80kg de instrumente stiintifice fata de 174kg in total si 6 kg instrumente stiintifice a generatiei anterioare de rovere) o incetinire eficienta in atmosfera pana la o viteza sigura de functionare a sistemului cu airbaguri folosit pana in prezent nu a fost posibila astfel ca NASA a venit cu aceasta solutie constructiva absolut spectaculoasa. Despre ce este asadar vorba? Dupa decuplarea de parasuta, platforma de sustinere va cobora asistat folosind forta de tractiune dezvoltata de un sistem de mini-rachete sustinut de aproximativ 2 tone de combustibil care ii va incetini si mai mult viteza, urmata apoi de activarea unui sistem asemanator cu un lift spatial atunci cand roverul cu rotile deja desfacute va fi coborat cu ajutorul unor cabluri speciale pentru o aterizare lina la suprafata.
Acest sistem complicat va permite o precizie la aterizare fara precedent (spre comparatie Curiosity se va regasi in aria unei elipse de 20km fata de roverele anterioare a caror precizie de parasutare a fost intr-o arie de 150x20km).
Dupa aterizare roverul va astepta nemiscat pentru o perioada de 5 zile permitand echipei de control de pe Pamant sa faca observatii complete asupra pozitiei la aterizare, asupra solului de sub rotile roverului si in general a starii de sanatate a sistemelor de bord dupa zborul prin atmosfera martiana, in asa fel incat activitatile ulterioare sa nu puna misiunea in pericol.
Prioritara va fi desfacerea antenei principale, testarea comunicatiei cu statia de sol, verificarea temperaturilor externe de la suprafata martiana pentru a se asigura ca nu se impun restrictii in ceea ce priveste operarea, descoperirea protectiilor care protejeaza camerele de care dispune roverul in asa fel incat ele sa poata fi folosite pentru achizitia de imagini cat mai repede si pregatirea instrumentelor stiintifice pentru operare.
Etapa finala, intrarea in modul de functionare nominal de culegere de informatii stiintifice, este programata pentru 1 an martian adica 687 zile terestre dar probabil ca si in cazurile precedente, durata de viata se va prelungi mult peste acest termen, cu atat mai mult cu cat noul rover este mult mai adaptat decat oricare din robotii anteriori conditiilor climatice potrivnice de pe Marte. Astfel Curiosity va fi echipat cu un reactor nuclear folosind plutoniu 238, care il va face practic independent de capriciile meteo martiene fara sa mai fie nevoie de perioadele de hibernare clasice la care au fost supuse Spirit si Opportunity. Va fi deasemenea mult mai performant in ceea ce priveste trenul de rulare, fiind capabil sa depaseasca obstacole de pana la 75 de cm inaltime si sa parcurga distante de pana la 90m pe ora (viteza medie estimate fiind undeva la 30m/s) (va urma).
credit JPL